0:00 0:00
Article
NVIDIA、ICRA 2026でロボティクス論文8本を発表——シミュレーションから実世界へ、実機データ不要で約80%成功も
NVIDIAは2026年5月28日、ICRA 2026で発表したロボティクス研究8本を公開しました。Isaac Lab上でのsim-to-real転移を軸に、実機データ不要で約80%成功のナビゲーション、把持成功率を41%から75%へ改善するGrasp-MPCなど、シミュレーションを土台に実機性能を引き上げる成果が並びます。
NVIDIAは2026年5月28日、ICRA 2026(International Conference on Robotics and Automation)で発表したロボティクス研究8本を公式ブログで公開しました。共通するのは「シミュレーションから実世界への転移(sim-to-real)が、ロボット能力を前進させる基盤になりつつある」というテーマです。Isaac Lab上で大量の合成データを生成し、実機投入前に方策を検証するアプローチが軸になっています。
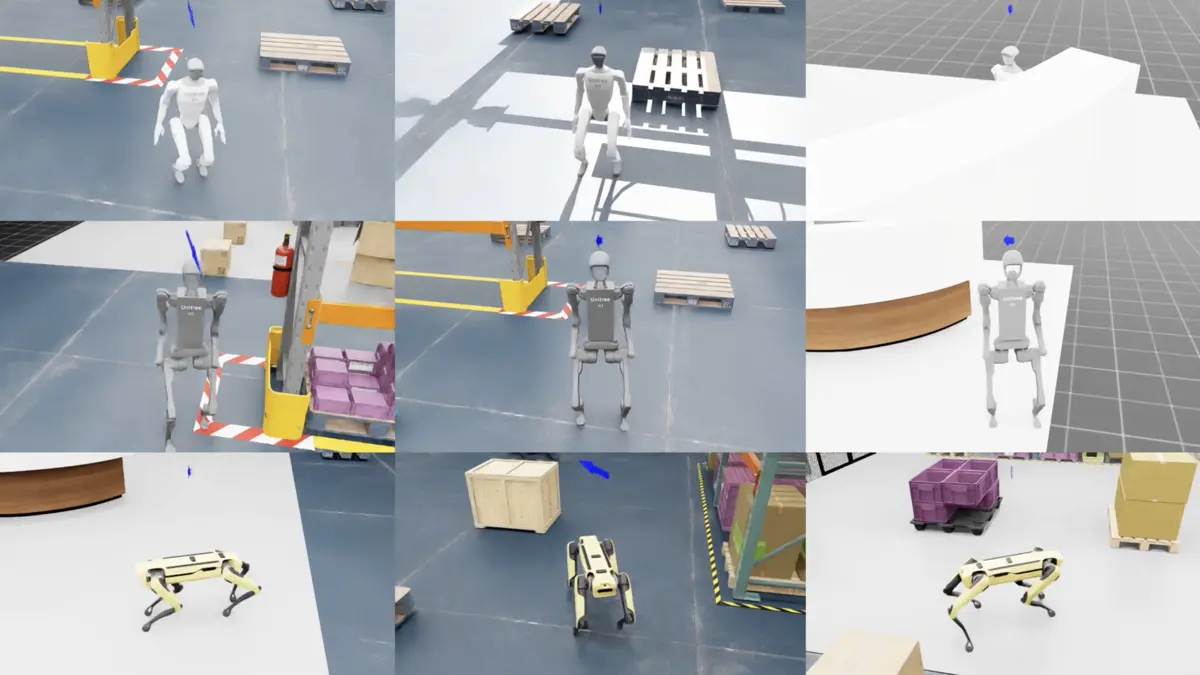
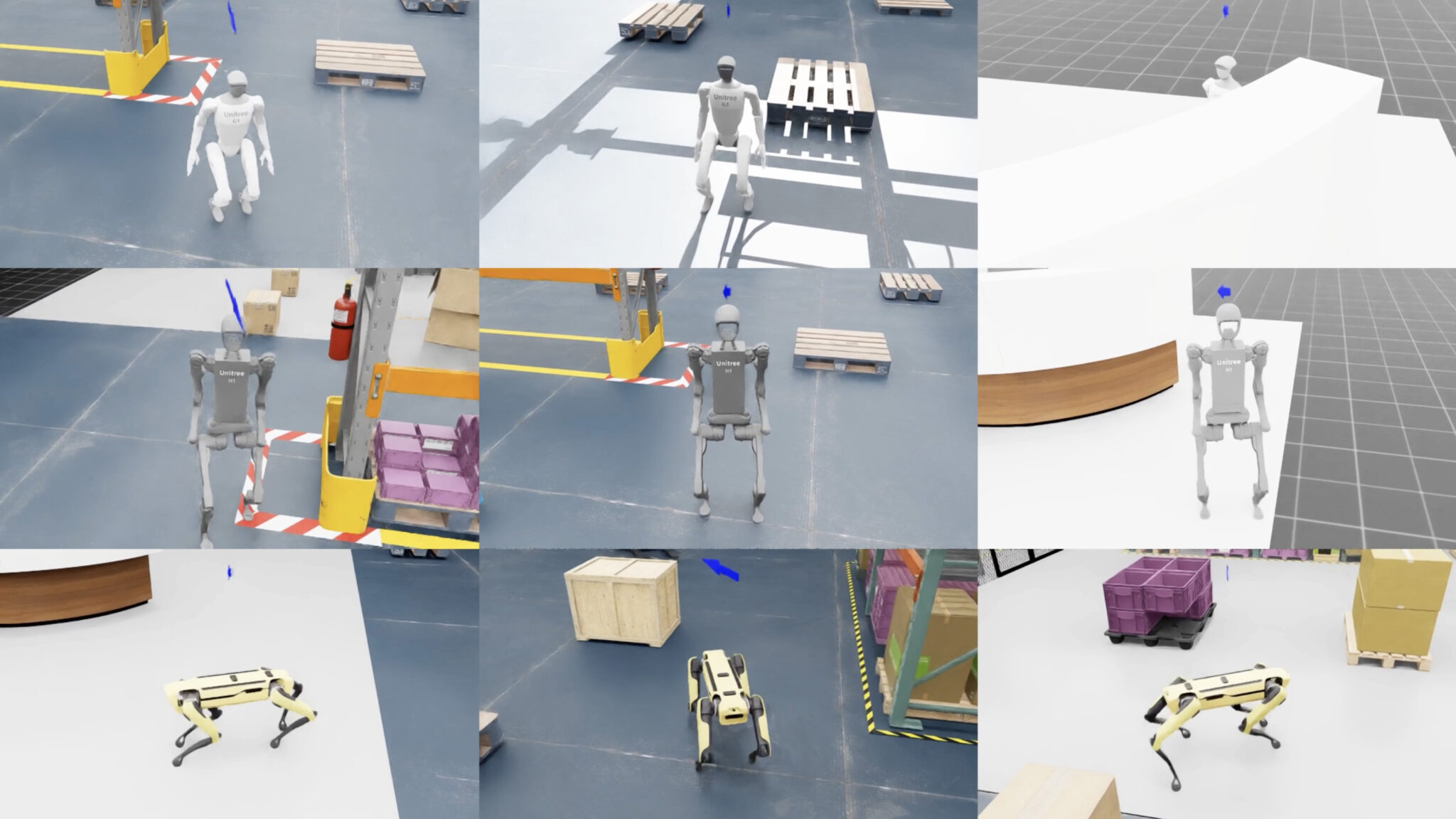
画像引用元: NVIDIA Blog
なぜ「sim-to-real」が重要なのか
実機ロボットの学習には、収集コストの高い実世界データと、ハードウェアを壊すリスクが常につきまといます。シミュレーションを使えば、開発者は膨大な合成データセットを生成し、多様なシナリオでテストし、ハードウェア投入前に方策(policy)を検証できます。これにより開発サイクルを加速し、物理テストのコストを下げられるというのが、sim-to-realの基本的な価値です。
課題は「シミュレーションで学んだことが、現実のノイズや物理的な誤差を含む実世界でどこまで通用するか」という転移のギャップです。NVIDIAの今回の研究群は、知覚・推論・計画・実世界適応という複数の段階で、このギャップを埋める手法を示したものと整理できます。
Isaac LabやIsaac Simといったシミュレーション環境、デジタルツイン検証用のOmniverse NuRecなどが、これらの研究を支える共通インフラになっています。
ナビゲーションと把持:実機性能の大幅改善
研究の中でも実用インパクトが大きいのが、ナビゲーションと把持の改善です。「COMPASS」は、異なるロボット形態(embodiment)間でナビゲーション方策を転移させるフレームワークで、Isaac Lab上で模倣学習と強化学習を組み合わせます。模倣ベースラインに対して成功率が4.5倍向上し、実世界の自律移動ロボットやヒューマノイドで約80%の成功率を、しかも実世界の学習データなしで達成したとされています。
把持では「Grasp-MPC」が、実行中の把持動作を継続的に補正します。8,000個のオブジェクトにわたる200万件のシミュレーション軌道で生成され、GraspGenデータセットとcuRoboモーションプランニングライブラリを活用。実機での把持成功率はベースラインの41%に対し**約75%**へと改善しました。
これらは「シミュレーションで大量に試行し、実機で高い成功率を出す」というsim-to-realの理想形を具体的な数字で示した成果です。
計画・組立・柔軟物操作の新手法
このほかにも実務に効きそうな手法が並びます。「ScheduleStream」はIsaac Lab経由でGPU上の並列マルチアーム計画を可能にし、複数アーム協調シナリオで3倍の高速化を達成。NVIDIA JetsonエッジAIプラットフォームに展開可能で、コードはGitHubで公開されています。
組立タスクでは「SPARR」がシミュレーションで一般戦略を学び、ハードウェア上で適応することで成功率を38%改善・サイクルタイムを約30%短縮し、未知のNIST組立タスクでは75%改善。「Refinery」は多段階の逐次組立タスクを扱い、シミュレーションで91%の成功率を実世界でも同等に再現するとされています。
「Deformable Cluster Manipulation」は、個別オブジェクトではなく絡まった柔軟素材を扱う研究で、生物学的成長方程式による合成樹木生成を用い、実際の枝でゼロショットのsim-to-real展開を実証。ケーブル管理や農業検査への応用が見込まれます。
視覚言語モデルの活用と大学連携
知覚面では「PEEK」パイプラインが、視覚言語モデル(VLM)でシーンの雑然とした要素を絞り込み、タスクに関連する部分だけを残します。シミュレーション学習方策の精度を41倍改善し、大規模なVLA(Vision-Language-Action)モデルで2〜3.5倍の向上をもたらすとされています。「SEAL」はカーネギーメロン大学、ユタ大学、シドニー大学との共同研究で、ロボットの実行が推論した指示に一致することを、再学習なしの実行時補正で保証します。
これらの研究を支えるデータも公開されています。NVIDIA Physical AI Datasetは1,500万回以上ダウンロードされ、世界最大のオープンロボティクスデータセットとされています。さらにICRAで採択された約50本の論文が、カーネギーメロン大学、ETH Zurich、MIT、テキサス大学オースティン校などからNVIDIA技術を参照しています。
ロボット開発の現場では、「実機で何度も試す」から「シミュレーションで大量に試して実機に持っていく」へと開発の重心が移りつつあります。今回の研究群は、その移行が具体的な成功率の数字を伴って進んでいることを示すもので、ロボティクスに関わるエンジニアにとって、自分の開発パイプラインにシミュレーションをどう組み込むかを考える材料になりそうです。
NVIDIA Research Advances Robotics From Simulation to the Real World
Featured at the International Conference on Robotics and Automation, eight new NVIDIA Research papers show how robots trained in simulation are moving into the real world.